角度分解能とは?
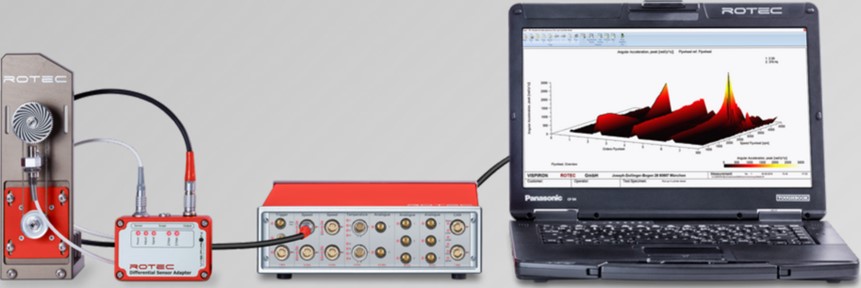
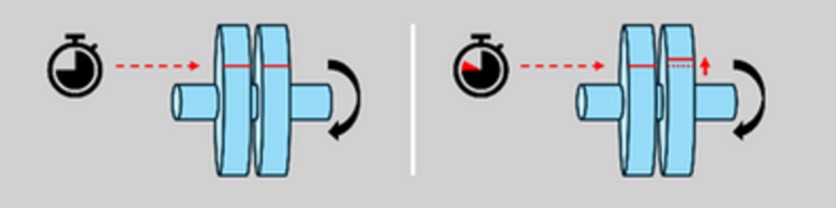
角度分解能とは計測器を使用して計測できる最小の角変位の事です。この写真は捩れ振動用角度計測装置の1例です。ひと目では、これで1/1000度以下の分解能で角度を計測できるとは判りません。
これはどのように動作するのでしょうか?
回転速度計測とは?
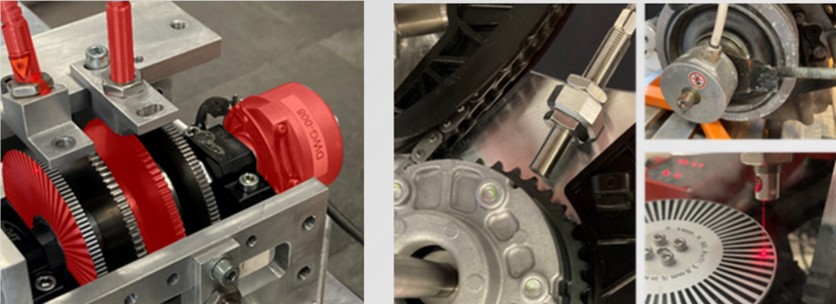
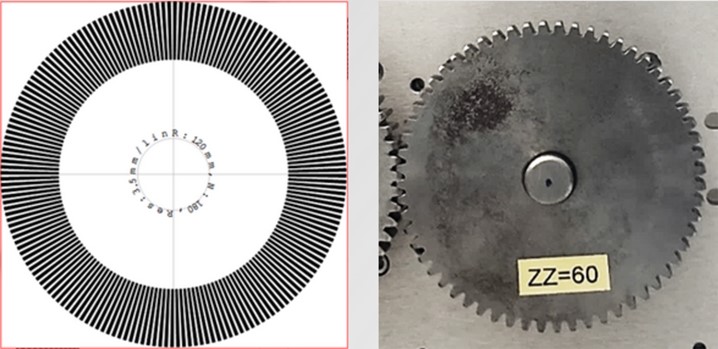
回転速度はシャフト自体で計測されませんが、等角マーキングの補助を利用します。これは歯車と磁気センサー、線間パターンとライトバリアあるいはインクリメンタル・ロータリー・エンコーダーでも可能です。全ての場合、回転シャフト上のマーキング(歯か、線)間の時間を連続的に計測します。
振動角とは?
周期的な回転速度変動は振動角となります。これはシャフトが一定の回転と比較して前後に揺れる(オシレーション)ことによる回転角度です。さて、問題はそのような振動角をどれ程小さくまで検知できるかです。
これは角度分解能の問題です。
角度ピッチとは?
角度ピッチは回転速度計測用のマーキング間の角度変位です。これは1回転360度を1回転当りのマーキング数で割った角度です。60歯の場合、6度であり、720マーキングの場合、0.5度です。これがマーキング間の角度変位ですので、我々は6度毎か、0.5度毎に回転速度計測値を得る事できます。
しかし、これもまた、角度分解能でしょうか?
答えはNo.です。角度分解能は角度ピットとは関係なく、1回転当りの計測数から結果となる角度ピッチよりはるかに小さく、詳細なものを意味します。デイスク、歯車の切片を見る時、信じがたいように思えます。そこで更なる説明が必要です。
どうして720ラインが結果として0.5度の角度分解能とならないのか?
なぜならディスクは回転し、我々は高分解能のストップウォッチを使用するからです。
なぜなら、ディスクは回転し、・・・
これはあなたの前のテーブル上に置かれているデイスク片、歯車を性的に見る事とは本質的に異なります。停止状態では、あなたは角度ピッチあるいは、歯数を見てこれが角度分解能を決定していると指示できます。
なぜなら、ディスクは回転し、・・・
・・・そして、ひと目見た時よりはるかに詳細な情報を明らかにします。必要な事の全てはこの情報を得る為に適切な計測手法、計測機器を使用する事です。ここでとても高い分解能を持ったストップウォッチが写真に入ってきました。

・・・そして我々は高分解能のストップウォッチを使用します。
高分解のストップウォッチは回転速度計測ボードの一部です。エレクトロニクスのストップウォッチはマニュアルのストップウォッチよりはるかに速い12.3 GHzのクロック周波数で動作する“タイムカウンター”です。この高周波クロックは結果として大変細かい時間分解能になります。
回転計測ボードの時間分解能はどれ程優れていますか?
時間分解能は計測中に決定する事ができ、正確な1つのクロックパルスとなる最小の時間差です。12.3 GHzのクロック周波数は81.3ピコ秒になります。
Δt_分解能=1/f_クロック=1/12.3 GHz=1/12,300,000,000 s
=0.000 000 000 081 301s =81.3 ps
もし何かが81.3 ps程で発生したとすると、異なるカウンターステップ数となり、認識され、解決策となり得ます。そして、我々は探している角度分解能を得た事になります。

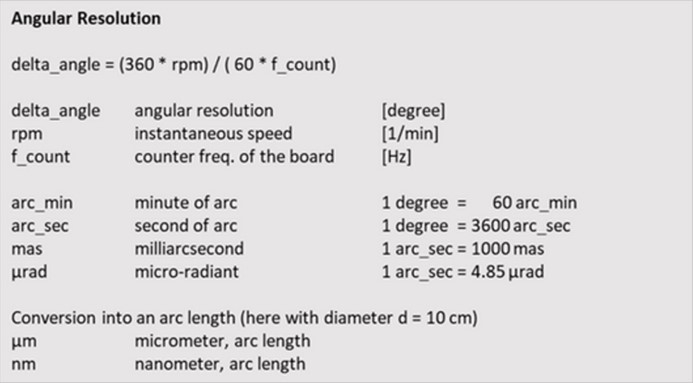
角度分解能をここからどのように解析しますか?
もし(平均)回転速度を知っているなら、クロック時間にシャフトが回転する角度を計算できます。

これが角度分解能です。これは一定ではありませんが、変動する回転速度と、クロック周波数のような一定時間分解能に依存します。これはまた、角度分解能が1回転当りの計測数に全く依存しない事に注意が促されます。
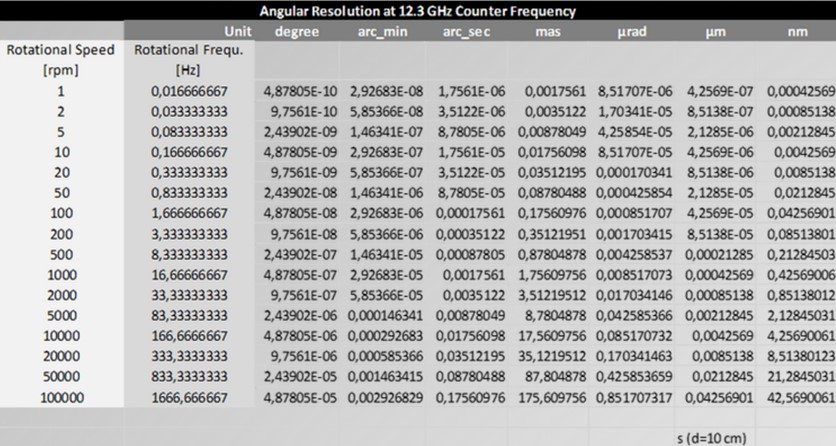
従って、この角度分解能、例えば、(振動)角をどれだけ詳細に計測できるかは、歯車、デイスク、あるいはエンコーダーの角度ピッチに依存しません。一般的には、角度分解能はいつも1/1000度より細かいものです。例として以下テーブルを掲げます。
これは60歯の歯車と6度の角度ピッチで1度よりかなり小さな振動角を認識可能な事を意味しています。
どのようにこれをイメージできますか?
もし歯車が連続的に回転せず、前後に変動しているなら、歯間の時間間隔で角度を計測する事は有効ではありません。この場合、変動(振動)角が角度ピッチより小さいなら、計測値は記録される事は全く保証されません。この場合、それはカウントされるべきクロックパルスではなく、(振動の前後を意味する±の)印を持った角度ピッチです。そしてここでは、角度分解能が実際には角度ピッチと同等です。
しかし、我々は連続的に回転するシャフトをみており、ストップウォッチを使用する事ができます。
1歯のみであるなら、何が起こりますか?
もし回転するシャフトに1つのみのマーキングがあるデイスクをイメージするなら、角度分解能が角度ピッチに無関係である事を簡単に理解できます。初めにマーキングが完全に整列されている2枚のデイスクを使います。従って、マーキングはいつも時間軸では同じ点で検知されます。時間差が検知されるまで、お互いに(とても小さな)量で2枚のデイスクを回転させます。ここで、計測によって角度位置を区別する事ができます。これは計測装置で表示する事のできる、そして定義上、角度分解能である最も小さな角度変位です。
そしてこれは、どれだけ細かな角度ピッチでもないのです。
角度分解能の値はいくつですか?
上の公式とRotecの回転速度計測ボードのクロック周波数12.3 GHzを使用すると、以下値が回転速度に依存した角度分解能として得られます。
角度分解能の値は現実的ですか?
はい、絶対にそうです。公式は嘘ではありません。それでは、Rotecの回転速度計測ボードでそのような小さな角度を計測可能ですか?どうして確かにそう言えますか?分解能と精度は計測業務において混同すべきではありません。
24ビットのアナログーデジタルコンバーターは224電圧レベルを持っています。従ってその分解能は入力電圧範囲の1/16,777,216です。これは10Vでは0.596μVです。
この精度は実用的には到達しませんが、これは分解能を減らします。回転速度計測において、マーキングと角度分解能で同じ事です。
歪みと電気信号のノイズと同様にマーキング(歯車と磁気センサー、ラインパターンと光スキャニングあるいはエンコーダー)の不正確さは分解能より大変重要であり、精度には決定的です。

定規でさえ、分解能はmmスケールであり、精度には限界があります。曲がった定規で部屋を図るのは限度を超えており、それを使っての計測は簡単ではありますが、不正確です。
1回転毎の計測値の数はどうして重要ですか?
大変大きなものは計測手法の角度分解能としては使用されません。1回転当りの計測値の数は回転速度と角度位置計測用のサンプリングです。ナイキストーシャノンのサンプリング理論は各々のサンプリング用に考慮されなければなりません。1回転毎に充分な計測値があれば、1回転の間に回転速度が急激に変化し、従って高周波の振動角度をエラー無しで計測する事ができます。しかし別の課題があります。
一回転当り多くの計測は単に一回転当りの計測数を増やすだけで、個々の計測の角度分解能を増やしてはいません。角度分解能を増やす由一の助けはより近くで見ることであり、頻度を増やして見る事ではありません。高分解能時間計測は正確に見え、計測対象物のみを連続して回転させる必要があります。
同じような手法は他にはどこで使用されていますか?
Global navigation stellite systems (GNSS)が同じ手法を利用しています。最もよく知られたシステムはNAVSTAR GPS (Navigational Satellite Timing and Ranging – Global Positioning System)と呼ばれています。この名前が示すように、ここでは時間計測が重要な役割を果たしています。衛星は正確な原子時計を装備しています。地球上でGPSレシーバーの位置を決定する為には、時間差が決定され演算されます。これは道標、角度、距離の助けなく位置決めしています。
エレクトロニクスとソフトウェアーで時間が大変簡単に精度よく決定されます。従って位置は直接位置と角度を計測するより大変簡単に正確に決定されます。
これがそのままRotec計測システムが行っている事です。角度をではなく、時間の助けにより計測し、時間分解能はいつも充分すぎる程優れた12.3 GHzです。
重要点は何ですか?
角度分解能は計測装置で計測できる最も小さな角度変位です。
- Rotecの回転速度計測の角度分解能は(歯やライン数)の角度ピッチでは決まりません。
- それは歯車、デイスクと高分解能のストップウォッチが使用されている為です。
- 角度分解能はカウンテイング速度 (81.3 ps) とシャフトの回転スピードで決定されます。
- 角度分解能はシャフトが1クロックでの連続的な回転角度です。
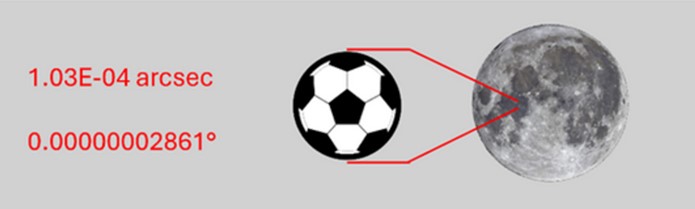
- この角度分解能は信じられない程細かく、一般的に到達可能な精度の制限がありません。
- 分解能と精度は計測業務では混乱すべきでありません。
以上

